 AI资讯汇
AI资讯汇机器人仿生手研究获重大突破:精准抓取技术开启新篇章
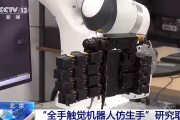
原创在机器人技术领域,仿生手的研究一直备受关注。近日,国内科研团队在机器人仿生手研究方面取得了重大突破,成功实现了精准抓取技术。这一成果不仅为机器人技术的发展注入了新的活力,也为未来机器人在更多领域的应用提供了可能。
仿生手作为机器人技术的重要组成部分,其性能直接影响到机器人的操作能力和灵活性。然而,由于人手结构的复杂性和抓取动作的多样性,仿生手的研究一直面临着诸多挑战。此次国内科研团队通过深入研究人手的结构和运动规律,结合先进的传感器和算法技术,成功开发出了一种具有高度灵活性和精准度的仿生手。
该仿生手采用了先进的触觉传感器和力反馈系统,能够实时感知抓取物体的形状、大小和重量等信息,并根据这些信息自动调整抓取力度和方式。在实际测试中,该仿生手成功完成了多种复杂抓取任务,包括抓取易碎物品、精密仪器等,展现出了高的性能和稳定性。
这一成果的取得,不仅标志着国内在机器人仿生手研究方面达到了国际先进水平,也为未来机器人在工业生产、康复、服务等领域的应用提供了有力支持。随着技术的不断进步和应用场景的拓展,相信仿生手将在更多领域发挥重要作用。
版权声明
本文仅代表作者观点,不代表AI资讯汇立场。
本文系作者授权AI资讯汇发表,未经许可,不得转载。
相关文章




作者文章
- 谷歌DeepMind AI生成视频可模拟真实运动,视觉技术再创新高 1年前 (2025-06-27)
- “AI歌曲”走红网络,音乐创作迎来新创意 1年前 (2025-06-27)
- 〈逆水寒〉手游与可灵AI合作,开启游戏体验新篇章 1年前 (2025-06-27)
- 智平方机器人进驻东风柳汽工厂,智能制造再添新动力 1年前 (2025-06-27)
- ChatGPT高级语音模式震撼升级,开启人机交互新纪元 1年前 (2025-06-27)